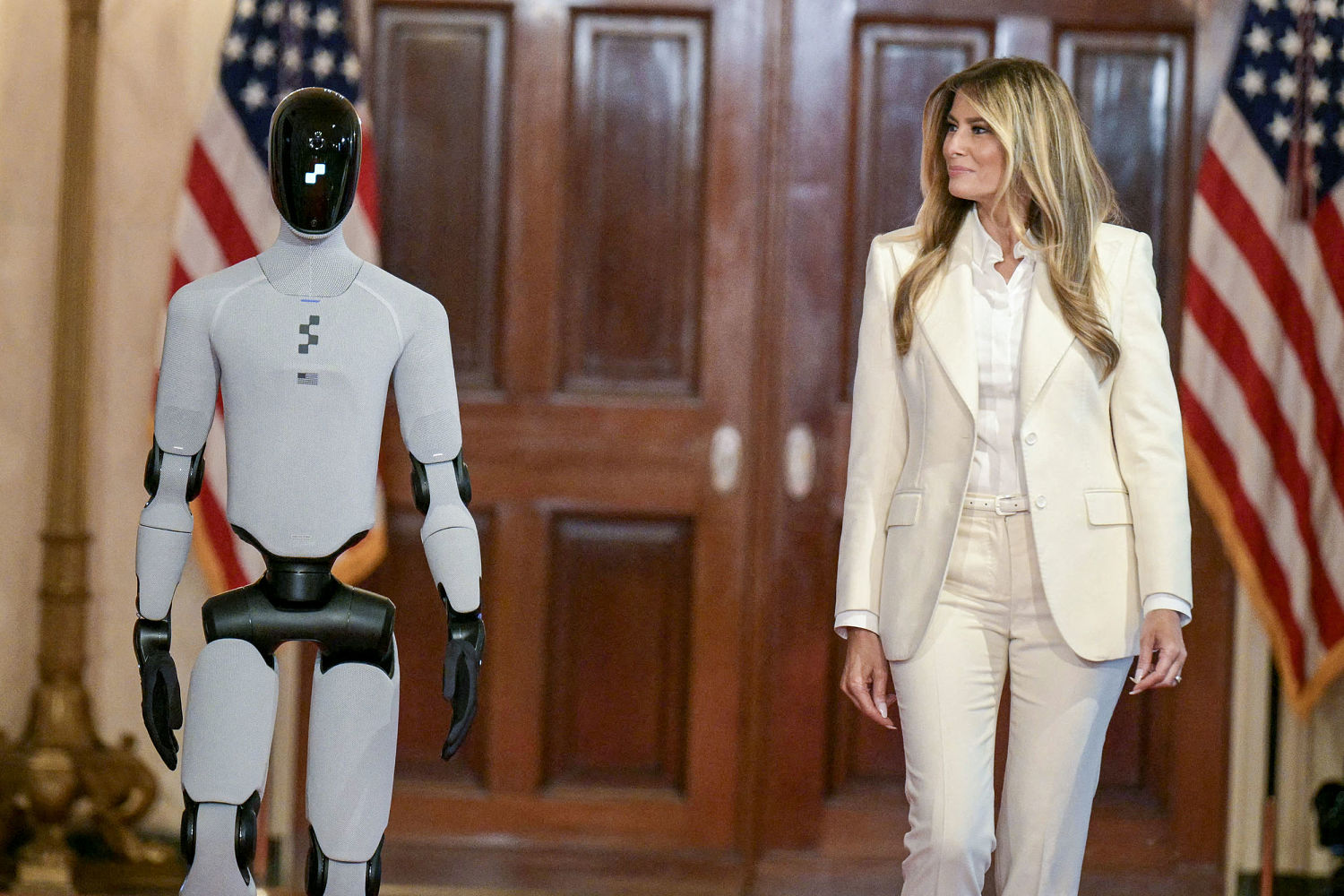
The physical proximity of Melania Trump to a humanoid robot at a White House summit serves as a high-fidelity signal of the shifting interface between traditional statecraft and emerging autonomous systems. This event was not a mere photo opportunity; it was a calculated deployment of social robotics to frame a specific narrative regarding American technological primacy. To understand the implications of this interaction, one must deconstruct the event through the lenses of anthropomorphic trust, the optics of technological stewardship, and the mechanical constraints of current-generation bipedal platforms.
The Mechanics of Interaction and Gait Synchronization
The visual of a human walking "side by side" with a robot involves significant computational overhead. Human walking is characterized by a "falling and catching" motion known as dynamic walking, where the center of mass moves outside the base of support. For a humanoid robot to match the stride and pace of a public figure, it must execute real-time adjustments via a complex sensorimotor loop. Also making waves recently: The Polymer Entropy Crisis Systems Analysis of the Global Plastic Lifecycle.
The stability of the robot in this context relies on three primary variables:
- Zero Moment Point (ZMP) Control: The robot's control system ensures that the point where total inertia forces equal zero stays within the footprint of the robot to prevent tipping.
- Visual Odometry: The robot uses onboard cameras (LiDAR or RGB-D) to map the immediate environment and the position of the human partner to maintain a consistent lateral distance.
- Active Suspension: To mimic the smoothness of a human gait, the robot's actuators must provide variable impedance, absorbing the shock of each footfall to prevent jerky, "uncanny" movements that would undermine the visual narrative of seamless integration.
The choice of a humanoid form factor—as opposed to a wheeled or quadrupedal platform—is a deliberate move to trigger "theory of mind" in the observer. When a robot possesses a head, torso, and limbs, the human brain automatically assigns it intent and agency. By walking alongside the First Lady, the machine is elevated from a tool to a "participant," signaling that the administration views AI and robotics as collaborative entities rather than mere industrial appliances. Further details into this topic are explored by Gizmodo.
The Architecture of Trust in Human-Robot Interaction (HRI)
The summit focused on the integration of these technologies into the domestic and social fabric. The presence of a humanoid in a high-status environment like the White House functions as a "de-risking" maneuver. Public perception of robotics is often bifurcated between the "industrial threat" (automation replacing labor) and the "existential threat" (autonomous weapon systems).
This interaction attempts to establish a third category: the Social Companion and Utility Asset. The logic follows a specific three-part framework:
- Normalization through Proximity: By placing a potentially intimidating machine in a familiar, carpeted, and domestic-adjacent setting, the "threat" profile is lowered.
- Validation through Association: The presence of a high-ranking political figure validates the technology's readiness. It suggests the system is safe, predictable, and controllable.
- Anthropomorphic Bridge: Humans are evolutionarily hardwired to interact with human-like shapes. The humanoid design utilizes "social affordances"—the robot's form tells us how to interact with it (e.g., looking it in the eyes, walking beside it) without requiring a manual.
Constraints and Technical Reality vs. Public Perception
While the visual narrative suggests a peer-level interaction, the technical reality is characterized by several "bottlenecks of autonomy." It is highly probable that the robot's path was pre-mapped or that it was operating in a semi-autonomous state with human-in-the-loop oversight.
Current humanoid platforms face significant power-to-weight ratio challenges. Carrying a high-density battery capable of powering 20 to 50 high-torque actuators while maintaining a slim, human-like profile limits operational time. Most modern humanoids can only operate for one to four hours before requiring a recharge. Furthermore, the "walking" seen at the summit likely occurred on a controlled, flat surface. Humanoid navigation on "unstructured terrain"—such as stairs, uneven grass, or crowded rooms—remains an active area of research with high failure rates.
The "cognitive" component of the robot—its ability to understand the context of the summit—is also likely decoupled from its "motor" component. While Large Language Models (LLMs) allow robots to speak fluently, the integration of "Reasoning to Action" (where the robot understands a command like "walk with Melania" and translates it into motor primitives) is still in its infancy. This creates a "Wizard of Oz" effect where the machine appears more capable than it is in a generalized environment.
The Geopolitical Function of the Humanoid Form
The deployment of a humanoid at a national summit is a display of "Soft Power 2.0." In the global race for AI supremacy, the ability to manufacture and control a high-functioning humanoid is a proxy for a nation's semiconductor capabilities, sensor fusion expertise, and software sophistication.
The strategy employed here categorizes the United States as a leader in "End-to-End" robotics. This involves:
- Upstream Dominance: Control over the AI models (the "brain").
- Midstream Dominance: Mastery of the precision actuators and materials science (the "body").
- Downstream Dominance: The cultural and political integration of the technology into society (the "application").
The choice to feature the robot in a non-military, non-industrial context is a move to claim the "Social AI" space before competitors can define it. It frames the technology as an extension of American lifestyle and values—ordered, sophisticated, and innovative.
The Cognitive Dissonance of the Uncanny Valley
One cannot analyze this event without addressing the Uncanny Valley—the hypothesis that as a robot becomes more human-like, it reaches a point where it becomes repulsive to observers. The robot used at the summit appears to have been designed to sit just on the "safe" side of this valley, likely utilizing a stylized, non-biological face.
$f(h) = \text{Affective Response}$ where $h$ is the degree of human likeness.
As $h$ approaches 100% (perfect human likeness), $f(h)$ drops sharply into the negative. By keeping the robot's aesthetic clearly "mechanical" while maintaining a human silhouette, the designers maximize the benefits of anthropomorphism without triggering the "corpse-like" or "zombie" revulsion associated with hyper-realistic androids. This allows the observer to focus on the symbolic meaning of the walk rather than the unsettling nature of the machine itself.
Strategic Realignment of Domestic Policy
The summit signals a shift in focus from "if" these robots will be integrated to "how" they will be regulated. The primary bottleneck is no longer the hardware, but the liability and safety frameworks.
The interaction between the First Lady and the robot suggests a future where these machines are treated as "co-habitants." This necessitates a move away from traditional "Machine Safety" (ISO 10218), which focuses on keeping humans away from robots, toward "Collaborative Safety" (ISO/TS 15066), which defines how robots can safely touch and move alongside humans.
The presence of the humanoid at the White House acts as a catalyst for:
- Standardization of HRI: Establishing protocols for how autonomous systems signal intent to humans in public spaces.
- Infrastructure Adaptation: Evaluating how "smart buildings" must be modified to accommodate bipedal movement.
- Data Privacy: Addressing the fact that a walking humanoid is a 360-degree mobile surveillance platform, constantly recording its surroundings to navigate.
The next tactical phase for organizations observing this trend is the "Vertical Integration of Embodiment." Companies should not merely invest in AI software but must analyze how that software interacts with the physical world. The "Melania-Humanoid" walk demonstrates that the most valuable AI will be that which can navigate the messy, unpredictable physical spaces built for humans. Organizations should prioritize the development of "digital twins" of their physical environments to prepare for the eventual deployment of autonomous mobile assets. The goal is to move beyond the screen and into the three-dimensional workspace where the most significant efficiency gains—and social impacts—remain untapped.



